VTVL Model Rocket
Ben Wolsieffer
For my capstone engineering project at Dartmouth (ENGS 89/90), I worked with a team of five other students to develop a model rocket that could perform vertical take off and landing (VTVL), inspired by the rockets developed by SpaceX and Blue Origin. This project was completed in partnership with STEM Robotix, a local company, with the intent of developing an educational product.
At the time of this project, there had never been a successful controlled vertical landing of a model rocket, let alone one developed as a product. Joe Barnard is trying to build a VTVL model rocket as part of a larger effort to build thrust vectored model rockets, and documenting his progress on YouTube.
Working with STEM Robotix, a FIRST Lego League team had developed an initial concept including a non-flyable prototype. This prototype, as well as all of our subsequent designs, used an electric ducted fan (EDF) to provide thrust during descent and thrust vector control (TVC) vanes to keep the rocket stable. Traditional solid fuel model rocket motors could be used during ascent, but they burn for a fixed amount of time with no throttle control, making a controlled landing difficult (but probably not impossible: Joe Barnard is attempting this method, and has come close), as well as being somewhat dangerous. Liquid fuel rocket motors allow throttle control, but are far too expensive and dangerous to be used in an product marketed at students or hobbyists. This meant that while landing, the rocket would not truly be a rocket, but could still demonstrate many of the same control principles.
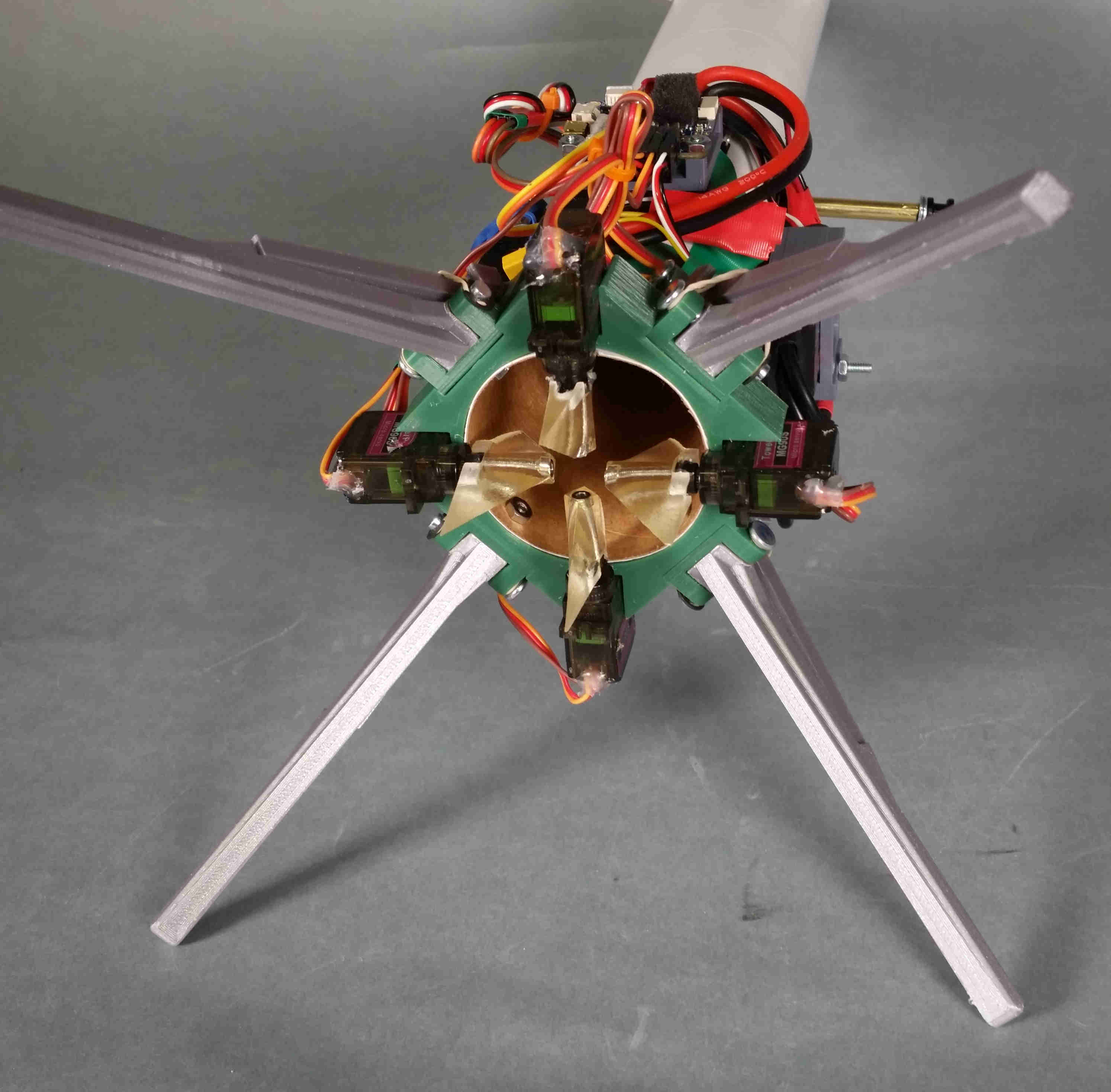
Thrust vector control vanes are used to keep the rocket stable during descent
The ascent and descent portions of the rocket were developed mostly separately. The ascent stage was not all that different from a traditional model rocket, except that the motor could not be placed within the rocket tube, which would hold the EDF. Instead we used modified versions of off-the-shelf boosters, which attach to the side of the rocket and fall off after the motor finishes burning. One of the challenges we ran into was getting all three boosters to reliably ignite.

Final prototype ready for launch (except for fins)
I primarily worked on the descent portion of the rocket, designing the electronics and software required to control the rocket. The electronics were mostly standard remote control hobby parts, including a quadcopter flight controller, 9g servos, a brushless motor powered EDF and a LiPo battery. The flight controller had all the sensors required to control the rocket, such as an accelerometer, gyroscope and barometric altimeter, integrated into a small circuit board. The flight controller ran a modified version of the open source ArduPilot firmware, which already provided stabilization algorithms for vehicles using a single propellor/EDF and TVC vanes.
I wrote a custom flight mode that implemented the full rocket launch and landing procedure. The rocket motors were ignited using a standard model rocket controller, and the flight controller would use the acceleration spike to detect the launch. Once the rocket passed apogee and flipped over into a stable descent, the EDF would start and try to maintain a constant acceleration that would cause the rocket to reach a desired speed and altitude. The rocket would then descend at constant velocty until it detected contact with the ground.
Once we had developed an initial flying prototype, we began to test by having it hover under human control, giving disturbance inputs and adjusting control loops to produce a better response. When we were satisfied that the rocket could basically keep itself stable, we needed a way to test the descent without actually launching the rocket. Our first attempt at this involved a set of large helium balloons that would lift the rocket and then drop it, but this proved to be unwieldy and extremely sensitive to wind. We then realized we could fly the rocket up to 40-70 meters under its own power and then stop the motor, let the rocket tumble, and attempt to recover. These tests showed that the rocket had difficulty recovring from the tumble. We ended up increasing the size of the TVC vanes, which resulted in a large improvement even in hover, and letting the rocket fall unpowered longer to allow it passively stabilize. These changes allowed us to get reliable descents, although we ran into issues with lateral motion causing the rocket to tip over as it touched down.
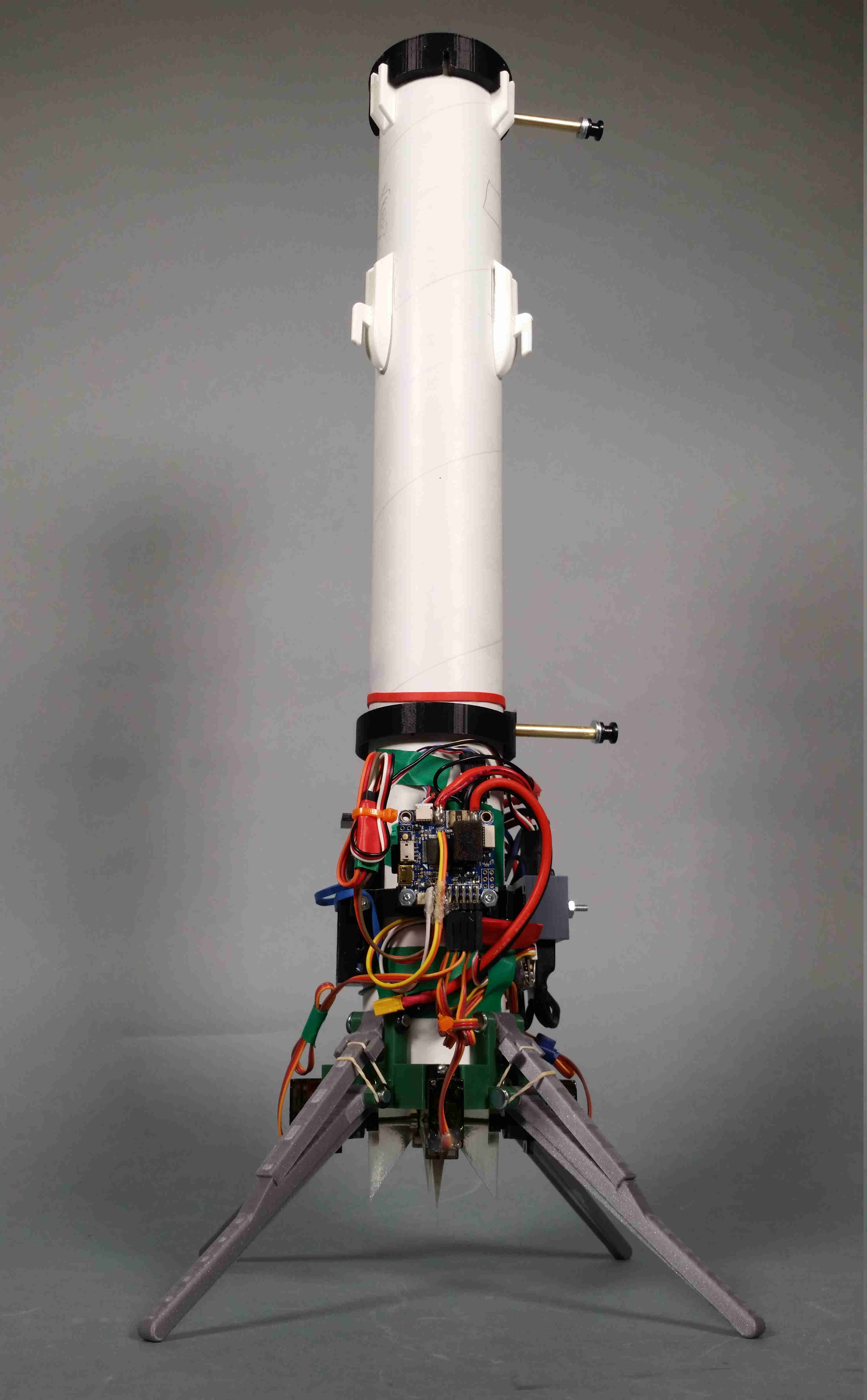
Rocket in its landing configuration
We then needed to integrate the ascent and descent stages. During ascent, the rocket has a fairing covering the electronics and TVC vanes to reduce drag. This needed to be ejected, and the landing legs needed to be unfolded after apogee. We tried to use nichrome resistance wire to cut through rubber bands to perform these deployments, but were unable to make this work well. Instead, for testing purposes, we used a single piece fairing that was ejected by the thrust of the EDF and simulataneously released the spring loaded landing legs. We were only able to perform one test of the full system, which despite impacting the ground at fairly high speed, was relatively successful in validating many aspects of the system. The ascent went well, but the EDF ramped up slower than desired due to a software issue that was not triggered in previous tests. The fairing also took some time to be ejected, leading to a total of approximately 0.5 seconds of delay, which caused the rocket to start falling too quickly to stop itself before hitting the ground. The strong acceleration forces of the launch also caused error in the altitude and velocity estimates, making the rocket think it was higher than it really was.
The cardboard body tube and many 3D printed plastic parts were damaged in the impact, and we were able to quickly rebuild the prototype. Unfortunately, we had reached the deadline for the project and could not perform more tests. Hopefully STEM Robotix will be able to continue the project.